BattleBots
three years' worth of robot destruction
While a high school student, I built fifteen-pound fighting robots for three years, competing nationally. My team won the title of “National Grand Champion” twice and was runner-up once. We were also awarded “Best Engineered” at the national competition for all three years in a row.
The battlebots competition was the very same type of competition you see on TV, but scaled down to 15 pounds (which is still quite a lot of weight to play with). There was a binder full of regulations, but the main objective was simple:
build a 15 pound robot that can smash others to smithereens in a 3 minute fight to the death
The destructive potential of these robots was huge, and components would often fail in unpredictable ways. In addition to the obvious need to have a powerful offensive weapon and strong defensive armor, these competitions were also a test of endurance. A winning robot had to survive about a dozen matches and still remain in fighting condition. This comes from careful design, an excessive amount of backup parts, and a skilled pit crew. The robots were all manually controlled, so handling and driver skill were also very important.
My role on these teams was the lead designer. I spent hundreds of hours tinkering with the designs in CAD, and filled up about 500 pages in various notebooks while working on the three generations of designs. I attribute much of my passion for engineering to these competitions. We’d spend an entire year building the best system we could, just to see it brutally destroyed. Then next year, we’d iterate on our design and make it better.
We competed in the SWPA BotsIQ and National Robotics League (NRL) competitions each year, where we fought against both high school and college teams.
The Punisher
 “The Punisher” was the first battlebot we made. We borrowed heavily for the first year, as another school was kind enough to send us some screenshots of their CAD files and give us general tips.
“The Punisher” was the first battlebot we made. We borrowed heavily for the first year, as another school was kind enough to send us some screenshots of their CAD files and give us general tips.
The design was somewhat standard for the competition. Many of the winning bots were similar, so I tried to replicate the key features. It had a strong internal frame made out of aluminum, which protected all the electronics. It featured a very large, very fast steel weapon in the front designed to throw opponents upward into the air. Sloped titanium plates covered every surface that could be attacked. The angle was chosen so opponents with a similar weapon design would scrape against it and be unable to grab strongly enough to throw the robot. The drive system had two motors directly driving the rear wheels, then two pulleys drove the front wheels, giving it four wheel drive. It was controlled like a tank, allowing it to spin in place, rush forward, or follow any curved path.
From a mechanical perspective, the design was very strong on paper. However, we ran into issues with manufacturing and assembling the robot. Most of these were caused by me designing absurdly complex geometries in CAD, then realizing it was impossible to manufacture the part in the real world. By the time I found this out, much of the design was already completed, so it wasn’t always possible to significantly improve the manufacturability.
 Additionally, the design was constantly over the weight limit, so we were constantly cutting corners to shave off precious weight. Can you spot the obvious flaw in the weapon?
Additionally, the design was constantly over the weight limit, so we were constantly cutting corners to shave off precious weight. Can you spot the obvious flaw in the weapon?
The electronics were also a weak point. Our drive motors were only rated for 12 volts, yet our battery was 20 volts nominally. Our three motors (left wheels, right wheels, weapon) drew insane amounts of power, which the cordless drill battery powering the robot was unable to supply. This was actually a silver lining since the voltage sag was so severe that our motors received the proper voltage. This only became an issue when we damaged our weapon and had to turn it off, leading to our drive motors burning up during a match.
We also faced issues with getting stuck on the arena floor. Years of robots falling from the sky left it pitted and uneven, and the clearance between our titanium armor and the floor was too small at times, lifting our wheels off the ground and immobilizing the robot.
Despite these flaws, it performed pretty well in competition, and you can see many of the matches on YouTube:
At the NRL competition, we placed 7th in a bracket of 63. However, the competition also requires participants to create a comprehensive binder documenting the entire design and manufacturing process for the robot. The “Grand Champion” award is weighted equally between competition performance and the engineering behind the robot. Incredibly, we won “Best Engineered” and this weighted our final score enough for us to win “National Grand Champion.”
This first battlebot was an incredible learning experience, and it taught us a lot of lessons that we were able to leverage in future designs. Personally, I’ve come very far from the time I designed the first weapon concept for the robot. 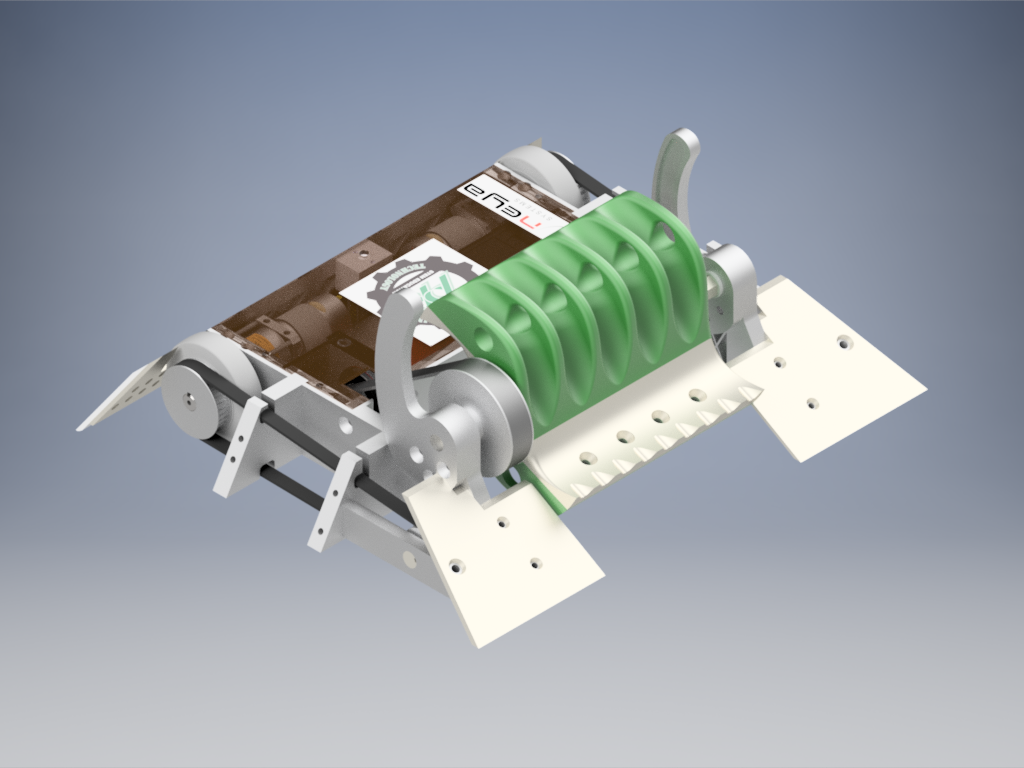
RAMbo
 “RAMbo” was the second robot I designed. Our school mascot was a ram, hence the name.
“RAMbo” was the second robot I designed. Our school mascot was a ram, hence the name.
The construction was very similar, but it was generally a much improved version of “The Punisher.” We manufactured more components out of aluminum (such the corner pieces, the motor mount, and the spacers on the side), rather than plastic. This allowed for better durability in matches.
 The real improvement was in the electronics. I switched to all brushless motors and even soldered together high performance lithium cells in order to make a battery capable of powering it. There was a learning cost to the more complex electronics but it paid off. The brushless motors produced better torque at low speed, giving the robot better acceleration. The custom batteries, while difficult and requiring safety precautions to build, were much improved. LiPo cells weren’t allowed due to the fire hazard, but our LiFePO4 packs had very little sag and could survive the 3 minute discharge rate.
The real improvement was in the electronics. I switched to all brushless motors and even soldered together high performance lithium cells in order to make a battery capable of powering it. There was a learning cost to the more complex electronics but it paid off. The brushless motors produced better torque at low speed, giving the robot better acceleration. The custom batteries, while difficult and requiring safety precautions to build, were much improved. LiPo cells weren’t allowed due to the fire hazard, but our LiFePO4 packs had very little sag and could survive the 3 minute discharge rate.
I also removed the channel in the weapon’s hitting surface that made it so easily deformable. Perhaps mistakenly, we also annealed it to a higher strength. This made it brittle, and it eventually shattered in a match.
Every match is on YouTube:
This robot had major improvements over “The Punisher,” but it still had its flaws in competition. We hadn’t yet figured out how to continue fighting if we’d been thrown upside down, and electrical and mechanical issues would occasionally plague us. We finished as runner-up in the overall scoring for “Grand Champion.”

Cerberus
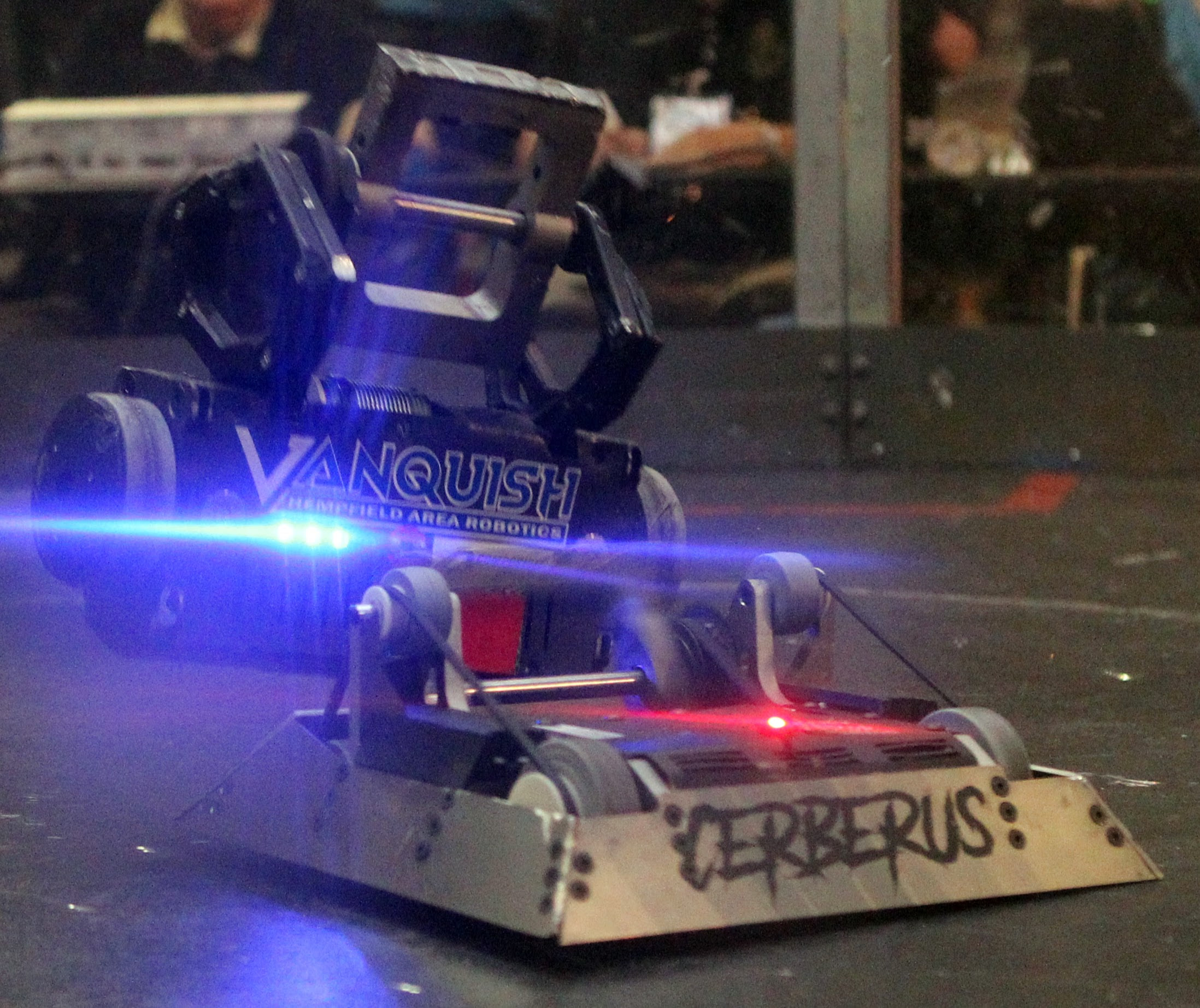
“Cerberus” was the third and final battlebot I designed. Similarly to “RAMbo,” it was an improved version of the design from the year before. However, this year, we did significant redesign, starting over from scratch rather than just performing many minor fixes.
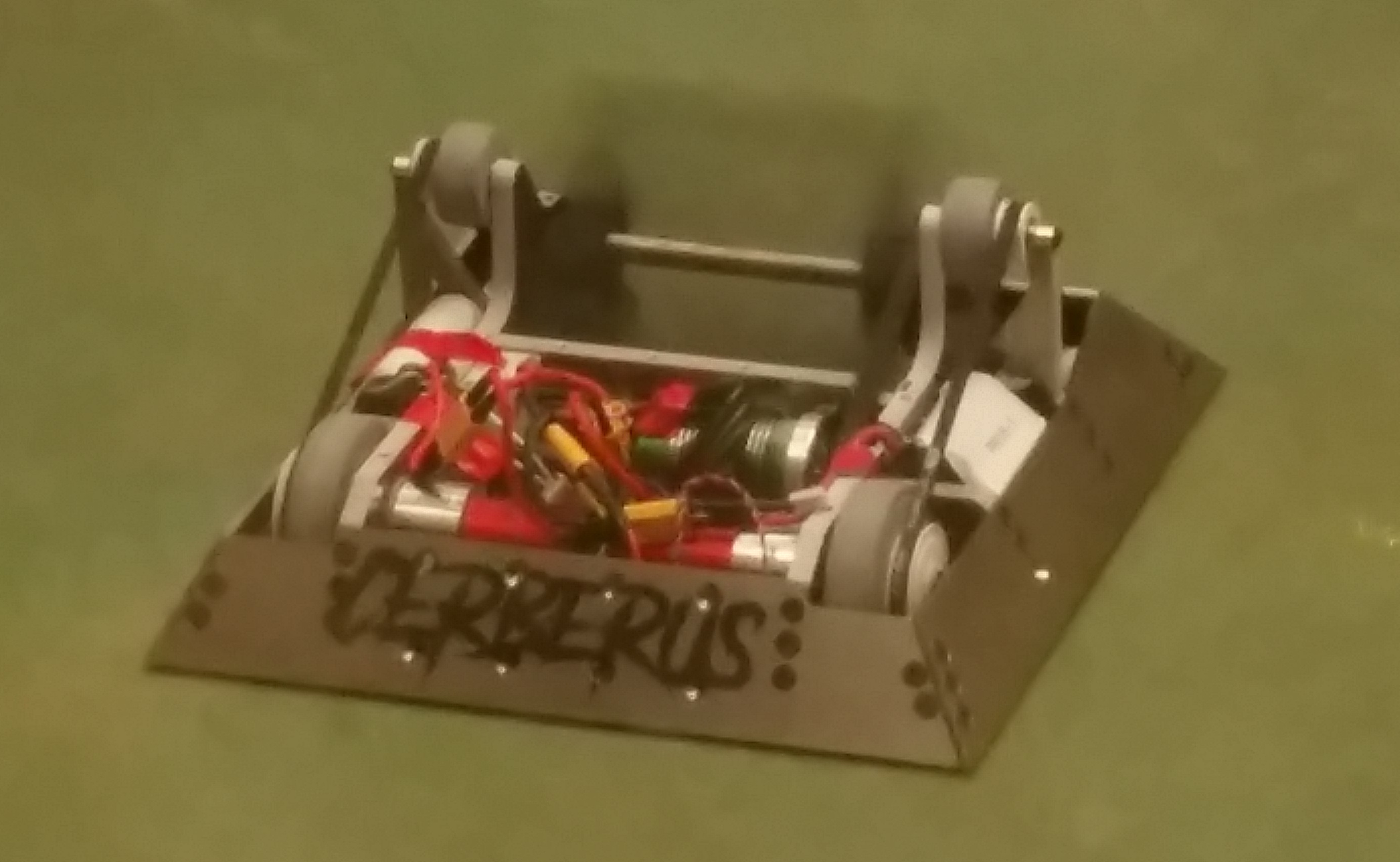 The reason Cerberus got its name is from the unique drivetrain. We had three powered wheels, including two that only touched when the robot was thrown upside down. This was necessary only once in competition, but it worked flawlessly. The extra pulley was also useful to get the belts up and out of the way so that we could store additional batteries between the aluminum frame and titianium armor.
The reason Cerberus got its name is from the unique drivetrain. We had three powered wheels, including two that only touched when the robot was thrown upside down. This was necessary only once in competition, but it worked flawlessly. The extra pulley was also useful to get the belts up and out of the way so that we could store additional batteries between the aluminum frame and titianium armor.
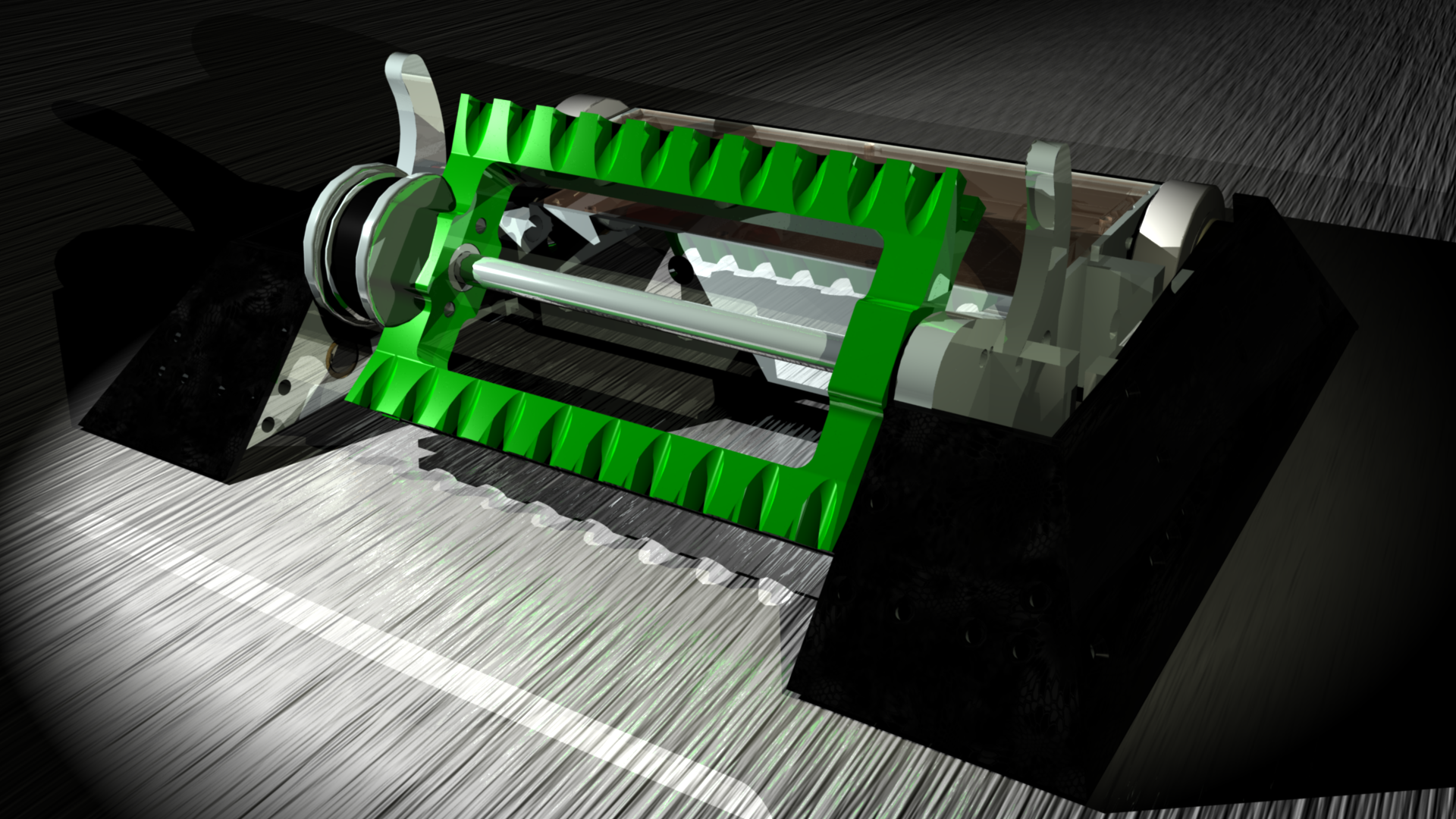
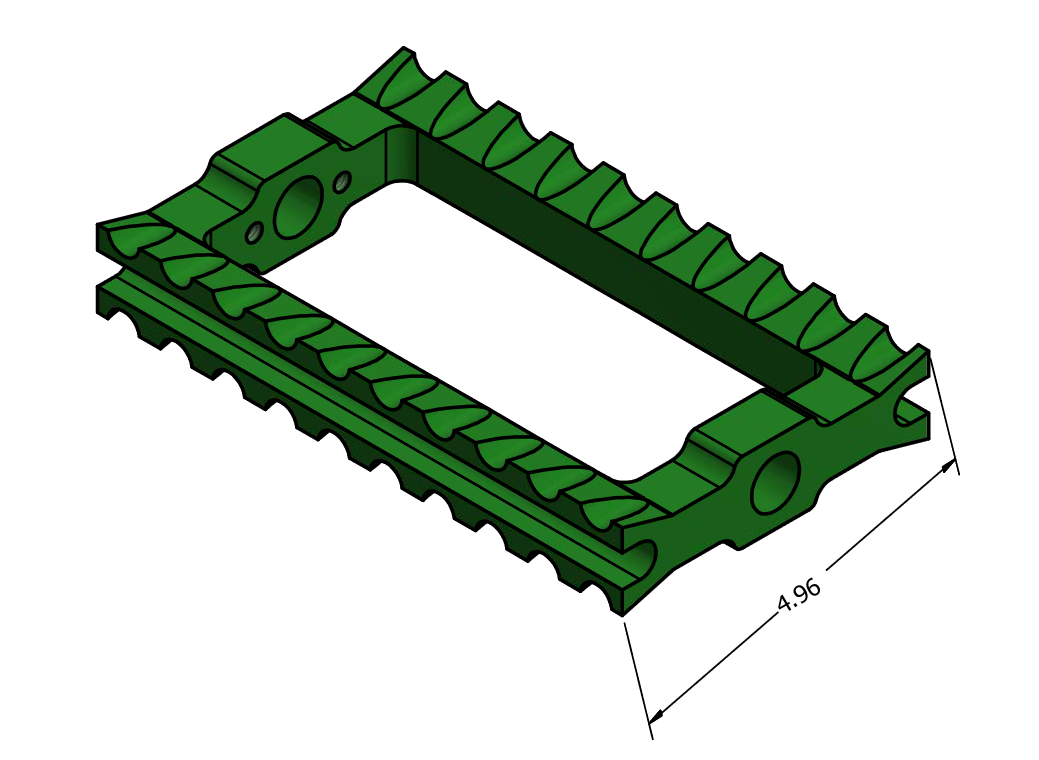
I put significant effort into the weapon system. We switched from using a “two hitter” design (two hits on an opponent per one revolution) to a “one hitter” design. This is done by making the weapon asymmetrical so that one side is heavier, but has a shorter radius. The tricky part is in ensuring it still balances around the same axis.
The benefit is that your weapon can dig in farther into an opponent’s armor, given fixed speeds for the robot and weapon. This gives a better chance to throw the opponent up into the air, which is important since most damage occurs when a robot falls to the steel floor from the top of the arena.
Another improvement with the weapon was in the pulley ratios. I performed experiments to see how the drag of the weapon varied with speed, then looked at how the drag increased the power draw and dropped the battery voltage (slowing the weapon). I could then precisely tune it to maximize the speed of the weapon, while also balancing power draw and spin up time.
Ultimately, I got a little under 4 pounds of steel spinning at about 10,000 rpm. The 1761 Joules it carried had some pretty fun destructive potential and is apparently pretty close getting punched by Mike Tyson. It also had a very low spin up time, allowing us to reach full speed within the first few seconds of a match and land a knock-out blow before the opponent had a chance.
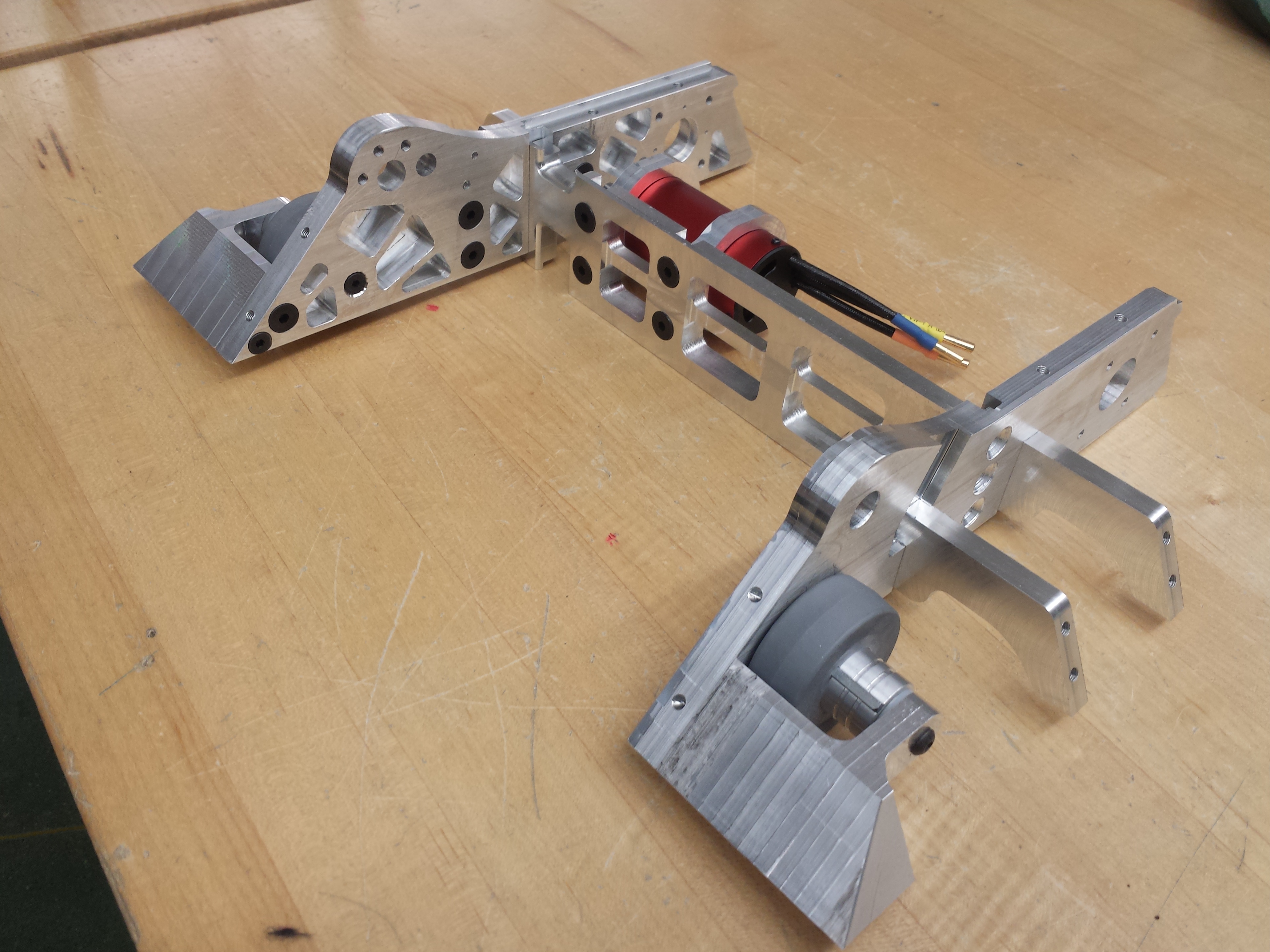
Another key improvement was that I redesigned an off-the-shelf gearbox to reduce weight. These gearboxes provided a 16:1 reduction for the drive motors, allowing high speed, low torque motors to generate the force to move the robot around the arena. The original gearbox was mostly steel, but replacing key opponents with aluminum cut the component’s weight significantly.
Lastly, I opted to use more expensive motors with built in sensors. The hall-effect sensors can detect the orientation of the rotor and allow the controller to produce even higher torque at low speed. This led to improved acceleration and “shoving” capabilities.
The final design was quite intricate, but all pieces were designed with significant thought put towards the techniques that would be used to manufacture them. 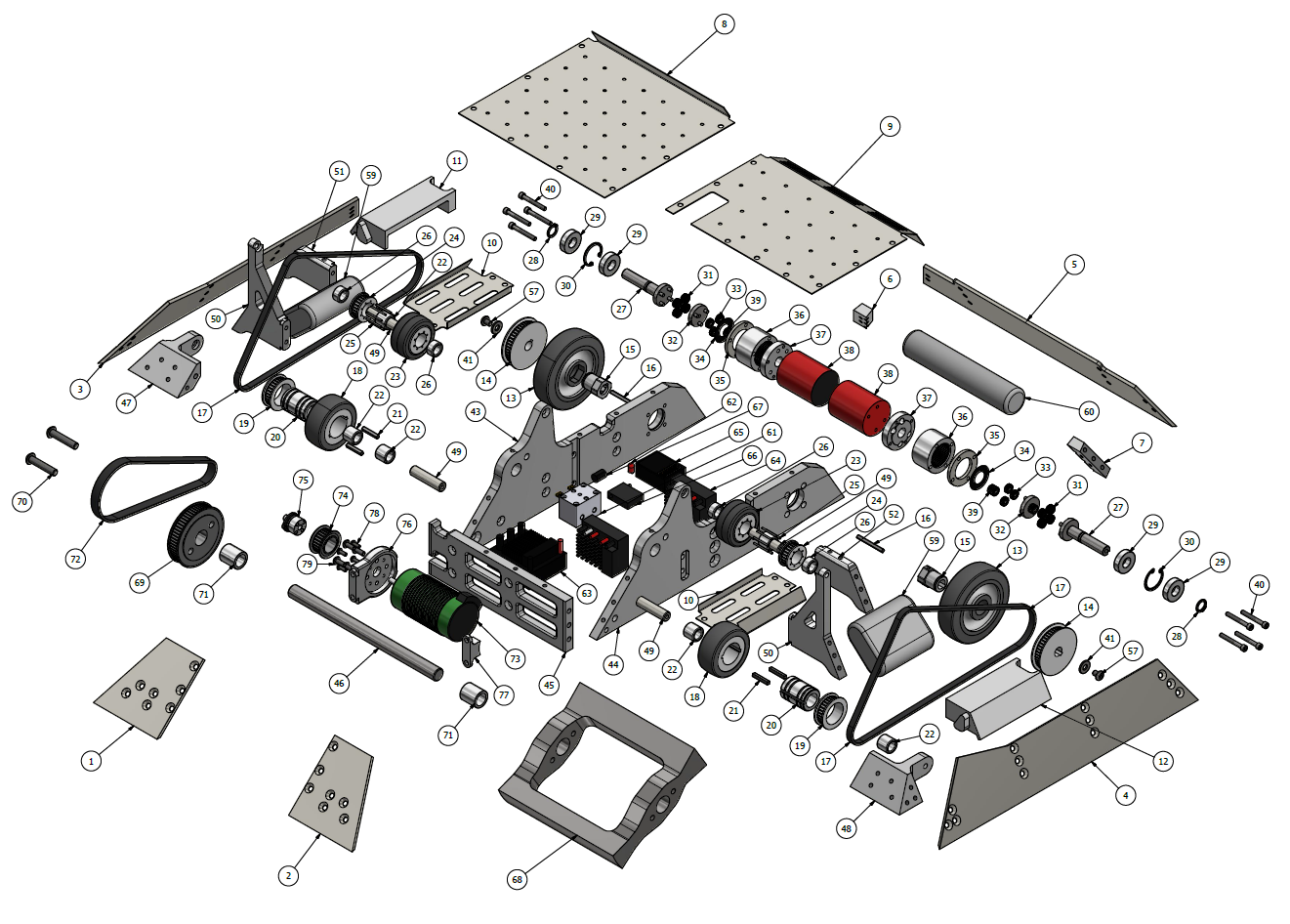
You can find all the National Robotics League matches on YouTube:
Our robot was incredibly successful in competition: we won practically every award there was to win. We finished first in the double elimination bracket, and also placed highest in the engineering judging, ensuring our win for “National Grand Champion.” This victory represented years of work by multiple people, and it was a very happy conclusion to my battlebot career.