DARPA Subterranean Challenge
autonomous collaboration in an underground environment
The summer after my freshman year, I returned to Neya Systems to compete in the DARPA Subterranean Challenge on Team CRETISE (Collaborative Robot Exploration and Teaming in Subterranean Environments). This DARPA challenge was created to develop new technologies in underground operations for both civilian first responders and warfighters. The first stage of the competition consisted of sending an unmanned vehicle into a mining tunnel, where it needed to build a map and search for artifacts. Artifacts could be human survivors, cell phones, cordless drills, fire extinguishers, or backpacks. Once it identified an artifact, it needed to determine its precise location relative to the start of the mine.
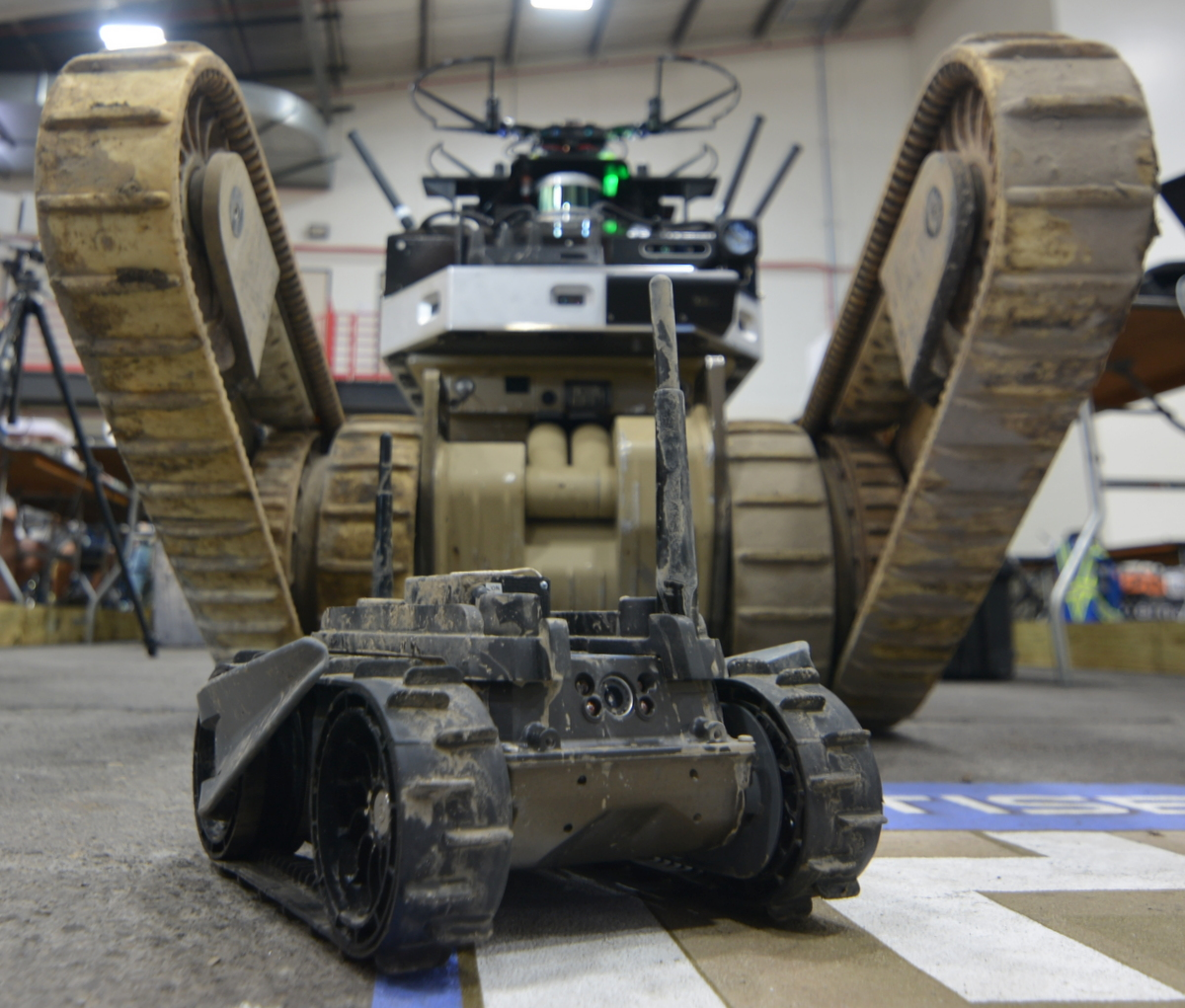
For our team’s solution, a large tracked ground vehicle acted as a mothership to other smaller autonomous systems. Small UGVs were deployed and functioned as mobile network repeaters, and a UAS could be deployed to provide an additional camera perspective.
I contributed primarily to the UAS component, which needed to launch from and land on the larger UGV, capture and stream live video, and precisely track its own position for accurate localization of artifacts seen in the video feed. Specifically, I created a localization system to use as ground truth during testing, designed and implemented the software architecture to integrate the flight controller into existing mission software, and prototyped a point cloud odometry system.
Through this project, I had the incredible opportunity to compete in a DARPA challenge alongside many talented individuals. I became experienced working with PX4 autopilots and integrating them with ROS, along with using point cloud data for localization tasks.
Image taken from IEEE Spectrum